2017 · 过度乐观期
「三年内机器人应该被完全解决,AI 还能攻克大定理,拿编程竞赛冠军」1
心胜于物: 从具身到智能
2025-12-05






Figure 03 的现实: TIME 记者在同一场 demo 里的记录
机器人往洗衣机装衣物时,连续两次把衣服掉在地上,始终不会自己捡起.
最终由工程师走上前,把衣物移出镜头,刻意移出我的视线.
But the robot’s limitations were too obvious to hide
Neo 的真相: 坦诚的 Teleop-first 路线
宣传: 像家用版 ChatGPT, 能接”家务清单”: folding laundry, organizing shelves, taking out trash…
高度依赖 远程遥操作 + 人类专家兜底, 而非真正端到端自主.
Data can solve almost all current problems.
— Brett Adcock1, CEO of Figure AI
高维空间的轨迹插值
无法建模信念状态
人工标注无法收敛
现象:OOD 场景下的性能崩塌
本质:基于像素的插值拟合,缺乏结构化推理
看似泛化,其实是场景记忆
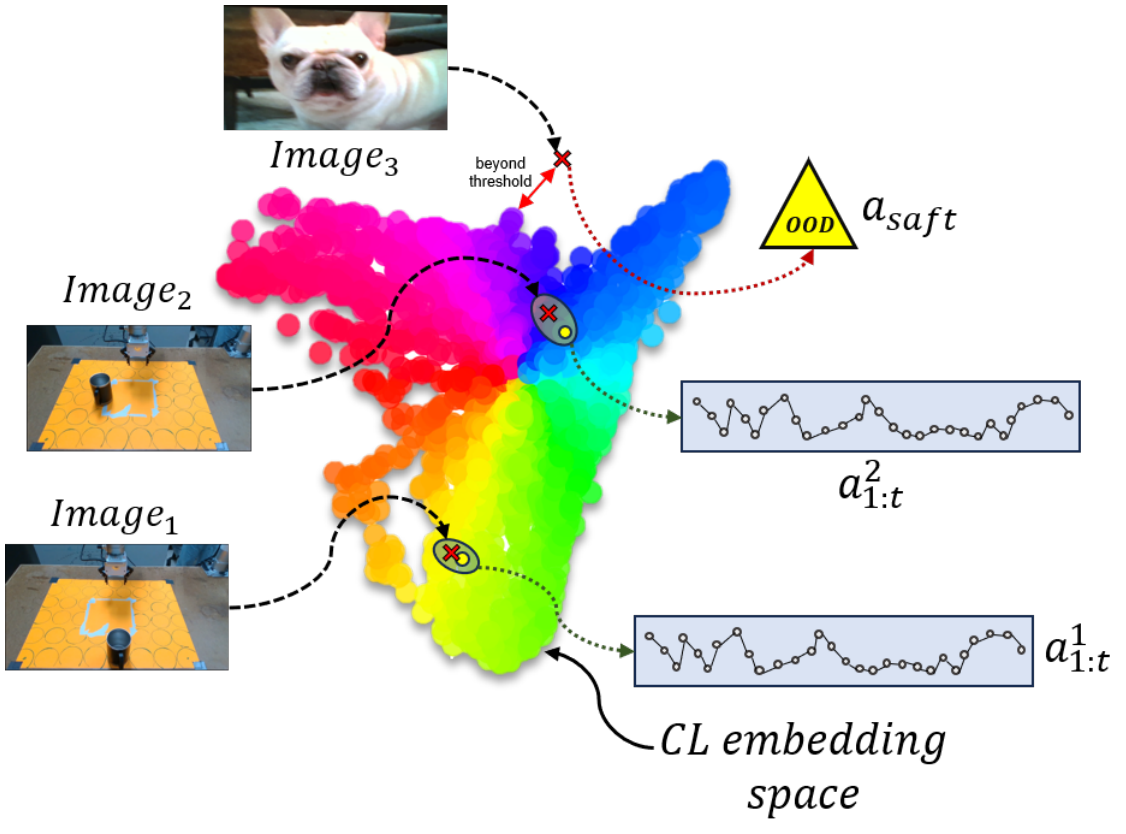
小世界:可以靠「记路径」
大世界:必须会「找新路」


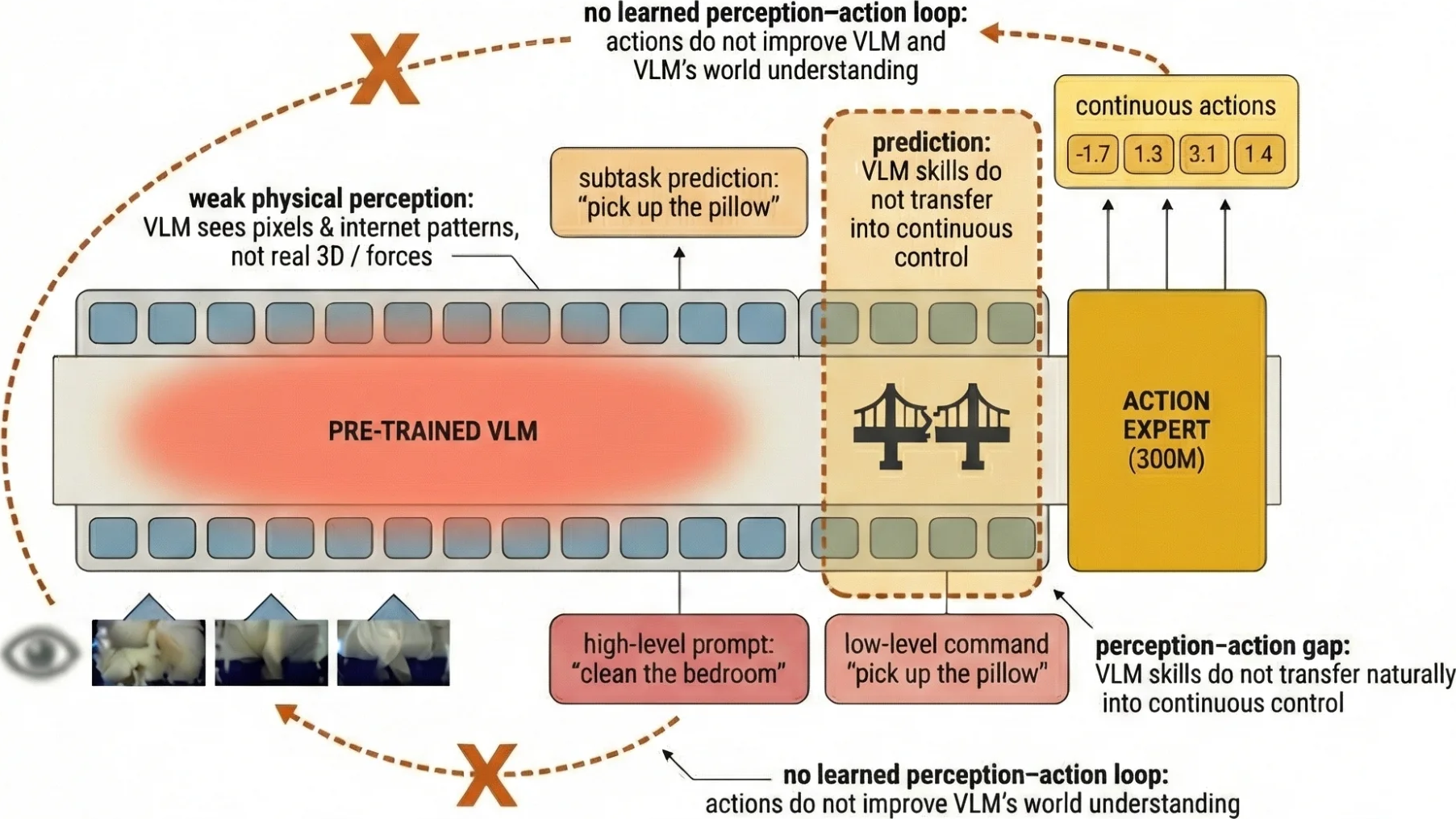
VLM 的世界仍是 token-space
在互联网图文上学模式,对 3D 结构、力学没有真实感知,“物理常识”是语言统计的幻觉
perception–action 结构性断裂
VLM 通过窄带子任务字符串接到动作 expert,语义与控制分离学习,通用能力难迁移到连续控制
没有形成 perception–action loop
动作只改进末端 expert,VLM 不因交互更新世界理解,无闭环反馈修正感知与决策
VLA用超级大的VLM把一堆teleop 轨迹拟合成”看起来像人”的快反应,
再幻想这些快反应会自己”涌现”出慢思考
路径不明 · ![]()
Yann LeCun
The big secret… is that companies have no idea how to make their robots smart enough to be generally useful.1
模态缺位 · ![]()
Rodney Brooks
Today’s humanoids will NOT learn dexterity in the real world, just from watching videos and doing end-to-end learning.2
资源错配 · ![]()
国家发改委
防范重复度高的产品「扎堆」上市,研发空间被压缩等风险.3
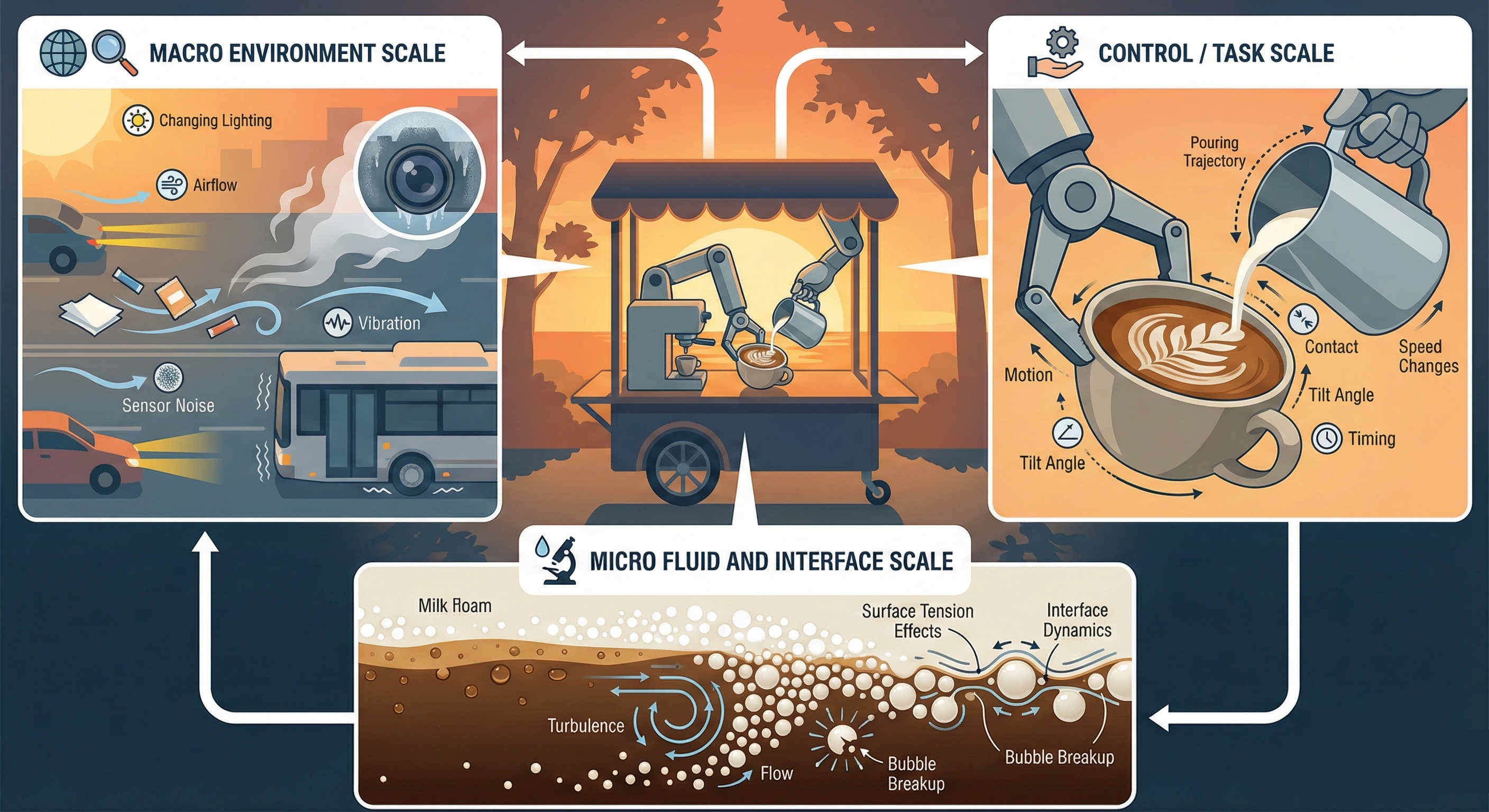
整个行业都在堆 demo,赌未来,但缺乏可验证的技术路线
VLA是在错误模态上放大投入, 但我们真的想要研究触觉吗?
资本盲目跟风炒作,导致长周期基础研究被边缘化
Warning
结论:当技术路线本身尚不清晰时,盲目扩大数据规模并非逼近真理,而是在放大系统性风险
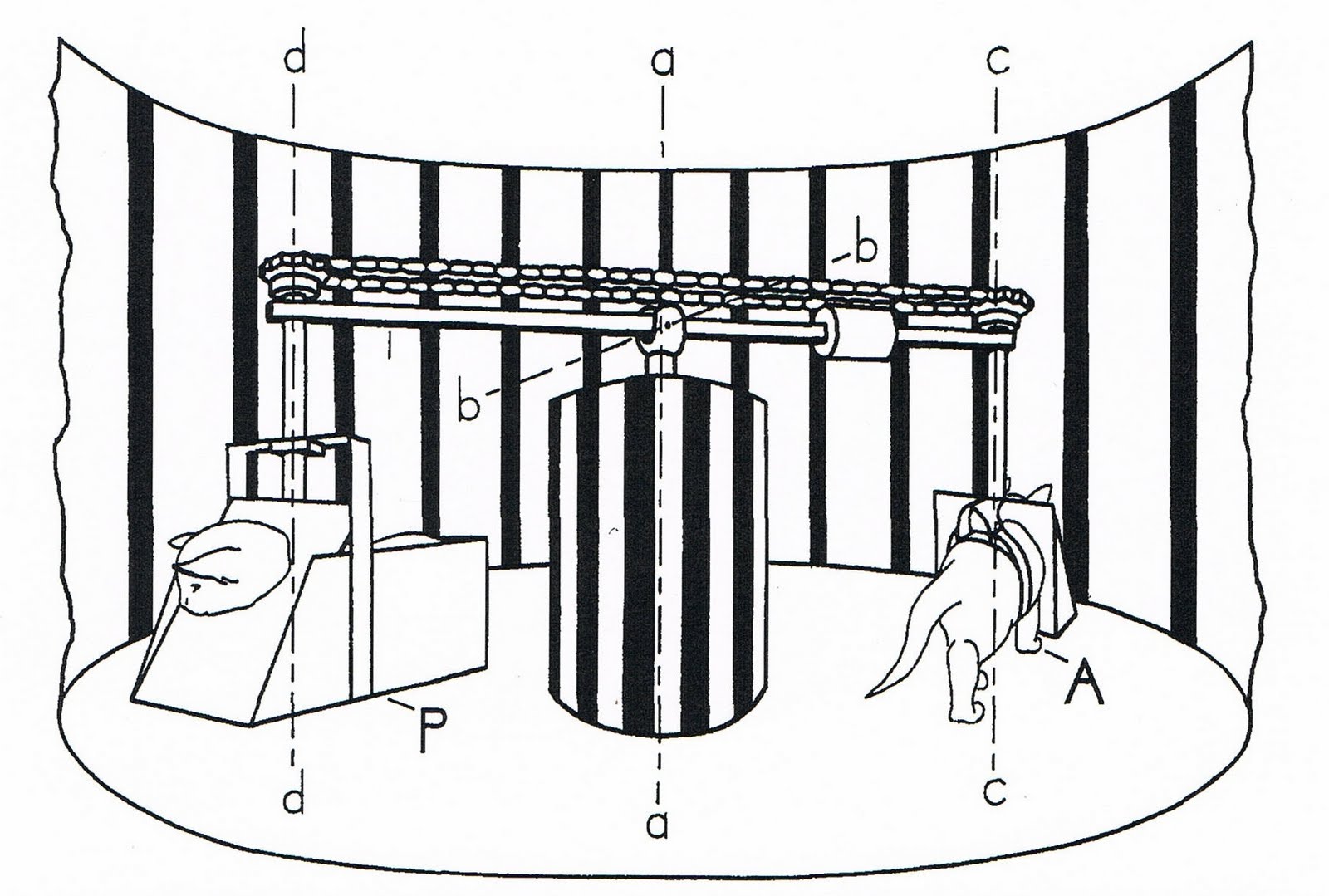
只有主动组的小猫发展出正常的视觉引导行为: 接近桌边时适当伸出爪子,对靠近的物体做出眨眼反应, 并能够避开视崖
经典的Held&Hein1旋转木马小猫实验经常被引用来说明具身性(embodiment)在认知发展中的重要作用